Optimización do rendemento con MPU-6050: configuración, calibración e aplicacións
2024-04-25
9228
MPU-6050 é o primeiro compoñente de procesamento de movemento de 6 eixes integrado do mundo, que integra un xiroscopio de 3 eixes, acelerómetro de 3 eixes e un procesador de movemento dixital escalable (DMP).O propósito de usalo é obter o ángulo de inclinación do obxecto a medir (como un quadcopter, un coche equilibrado) nos eixes X, Y e Z, é dicir, o ángulo de paso, o ángulo de rolo e o ángulo de yaw.Lemos os seis datos do valor de AD de aceleración de tres eixes MPU-6050 (valor de AD de velocidade angular de tres eixes) a través da interface I2C.Despois do procesamento de fusión de postura, pódense calcular os ángulos de ton, rolo e yaw.Como referencia direccional para os valores de medición, a definición da dirección de coordenadas do sensor é como se mostra na figura seguinte, que segue o principio do sistema de coordenadas da dereita (é dicir, o dedo dereito apunta á dirección positiva do X-O eixe, o dedo índice apunta á dirección positiva do eixe y e o dedo medio apunta á dirección positiva do eixe z).
Catálogo

Co seu bus de sensor I2C dedicado, o MPU-6050 é capaz de recibir entrada directamente dun compás externo de 3 eixes, proporcionando unha saída completa de 9 eixes MotionFusion ™.Elimina o problema de discrepancia entre o xiroscopio combinado e o cronograma do acelerador e reduce significativamente o espazo de embalaxe en comparación con solucións multi-compoñentes.Cando está conectado a un magnetómetro de tres eixes, o MPU-60x0 é capaz de proporcionar unha saída completa de fusión de movemento de 9 eixes ao seu porto principal I2C ou SPI (teña en conta que o porto SPI só está dispoñible no MPU-6000).
Alternativas e equivalentes
- MPU-3300
- MPU-6000
- MPU-6500
Fabricante de MPU-6050
O fabricante de MPU-6050 é TDK.Despois dos dous fundadores de TDK, o doutor Yogoro Kato e Takei Takei, inventaron a Ferrite en Tokio, fundaron Tokyo Denkikagaku Kogyo K.K.En 1935. Como marca global da industria electrónica, TDK sempre mantivo unha posición dominante nos campos de materias primas electrónicas e compoñentes electrónicos.TDK's comprehensive and innovation-driven product portfolio covers passive components such as ceramic capacitors, aluminum electrolytic capacitors, film capacitors, magnetic products, high-frequency components, piezoelectric and protection devices, as well as sensors and sensor systems (such as temperature and pressure,Sensores magnéticos e MEMS), etc. Ademais, TDK tamén ofrece fontes de alimentación e dispositivos de enerxía, cabezas magnéticas e outros produtos.As súas marcas de produtos inclúen TDK, EPCOS, Inensense, Micronas, Tronics e TDK-Lambda.
Diagrama de bloques internos de MPU-6050
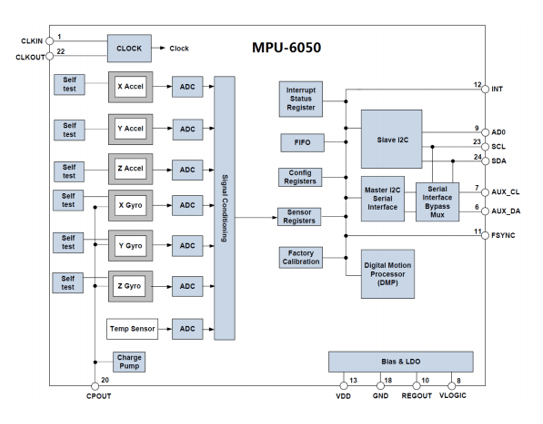
Entre eles, SCL e SDA están as interfaces IIC conectadas ao MCU, e o MCU controla o MPU-6050 a través desta interface IIC.Tamén hai unha interface IIC, é dicir, aux_cl e aux_da.Esta interface pódese usar para conectar dispositivos escravos externos, como sensores magnéticos, para formar un sensor de nove eixes.Vlogic é a tensión do porto IO.Este pin pode soportar un mínimo de 1,8V.Normalmente conectámolo directamente a VDD.AD0 é o pin de control de enderezos da interface Slave IIC (conectado ao MCU).Este pin controla o bit máis baixo do enderezo IIC.Se está conectado a GND, o enderezo IIC de MPU-6050 é 0x68;Se está conectado a VDD, é 0x69.Teña en conta que o enderezo aquí non inclúe o bit máis baixo de transmisión de datos (o bit máis baixo úsase para representar as operacións de lectura e escritura).No MWBalancedStC15, AD0 está conectado a GND, polo que o enderezo IIC do MPU-6050 é 0x68 (excluíndo o bit máis baixo).
Inicializa a interface IIC
MPU-6050 usa IIC para comunicarse con STC15, polo que necesitamos inicializar as liñas de datos SDA e SCL conectadas ao primeiro MPU-6050.
Restablecer MPU-6050
Este paso restaura todos os rexistros dentro do MPU-6050 aos seus valores predeterminados, que se consegue escribindo 1 a BIT7 do rexistro de xestión de enerxía 1 (0x6b).Despois do restablecemento, o rexistro de xestión de enerxía 1 restaurarase ao valor por defecto (0x40), e este rexistro debe posteriormente establecerse en 0x00 para espertar o MPU-6050 e poñelo en estado de traballo normal.
Estableza o rango a escala completa do sensor de velocidade angular (xiro) e sensor de aceleración
Neste paso, establecemos o rango a escala completa (FSR) dos dous sensores a través do rexistro de configuración do xiroscopio (0x1b) e do rexistro de configuración do sensor de aceleración (0x1c) respectivamente.Normalmente, fixamos o rango a escala completa do xiroscopio a ± 2000DPs e o rango a escala completa do acelerómetro a ± 2G.
Estableza outros parámetros
Aquí, tamén necesitamos configurar os seguintes parámetros: desactivar as interrupcións, desactivar a interface AUX I2C, desactivar FIFO, establecer a velocidade de mostraxe do giroscopio e configurar o filtro dixital baixo paso (DLPF).Dado que non empregamos interrupcións para ler datos neste capítulo, hai que desactivar a función de interrupción.Ao mesmo tempo, dado que non estamos a usar a interface AUX I2C para conectar outros sensores externos, tamén necesitamos pechar esta interface.Estas funcións pódense controlar a través do rexistro de habilitación de interrupción (0x38) e do rexistro de control de usuarios (0x6a).MPU-6050 pode usar FIFO para almacenar datos do sensor, pero non o utilizamos neste capítulo, polo que todas as canles FIFO deben estar pechadas.Pódese controlar a través do rexistro de habilitación FIFO (0x23).Por defecto, o valor deste rexistro é 0 (é dicir, FIFO está desactivado), polo que podemos usar o valor predeterminado directamente.A taxa de mostraxe do xiroscopio está controlada polo rexistro de división de taxa de mostraxe (0x19).Normalmente, establecemos esta taxa de mostraxe a 50. A configuración do filtro dixital de paso baixo (DLPF) complétase a través do rexistro de configuración (0x1a).En xeral, estableceremos DLPF á metade do ancho de banda para equilibrar a precisión dos datos e a velocidade de resposta.
Configura a fonte do reloxo do sistema e habilita o sensor de velocidade angular e o sensor de aceleración
A configuración da fonte do reloxo do sistema depende do rexistro de xestión de enerxía 1 (0x6b), onde os tres bits máis baixos deste rexistro determinan a selección da fonte do reloxo.De xeito predeterminado, estes tres bits están definidos en 0, o que significa que o sistema usa o oscilador interno de 8MHz RC como fonte do reloxo.Non obstante, para mellorar a precisión do reloxo, a miúdo fixámola en 1 e seleccionamos o xiroscopio do eixo X como a fonte do reloxo.Ademais, habilitar o sensor de velocidade angular e o sensor de aceleración tamén é un paso importante no proceso de inicialización.Ambas as operacións están implementadas a través do rexistro de xestión de enerxía 2 (0x6c).Simplemente configure o bit correspondente a 0 para activar o sensor correspondente.Despois de completar os pasos anteriores, o MPU-6050 pode introducir o estado normal de traballo.Aqueles rexistros que non estean especialmente establecidos adoptarán os valores predeterminados predeterminados polo sistema.
Como funciona o MPU-6050?
Sensor de xiro
O sensor está equipado cun xiro dentro, que sempre permanecerá paralelo á dirección inicial debido ao efecto giroscópico.Polo tanto, podemos calcular a dirección e o ángulo de rotación detectando a desviación do xiro desde a dirección inicial.
Sensor do acelerómetro
Un sensor de acelerómetro é un dispositivo que pode medir a aceleración e funciona en función do principio de efecto piezoeléctrico.Durante a aceleración, o sensor mide a forza inercial aplicada ao bloque de masa e calcula o valor de aceleración usando a segunda lei de Newton.
Procesador de movemento dixital (DMP)
O DMP é un módulo de procesamento de datos no chip MPU6050 que ten un algoritmo de filtrado de Kalman incorporado para adquirir datos do xiroscopio e sensores do acelerómetro e procesar os cuaternións de saída.Esta característica reduce enormemente a carga de traballo do microprocesador periférico e evita o proceso de filtrado e fusión de datos tediosos.
Notas:
Cuaternións: os cuaterniones son números supercomplexos sinxelos.Os números complexos están compostos por números reais máis a unidade imaxinaria I, onde i^2 = -1.
Onde se usa MPU-6050?
- Xoguetes
- Auriculares e xogos portátiles
- Controladores de xogos baseados en movemento
- Tecnoloxía Blurfree ™ (para estabilización de vídeo/fixa de imaxes)
- Tecnoloxía AirSign ™ (para seguridade/autenticación)
- Recoñecemento de xestos IG ™ Instantesture ™
- Sensores usables para a saúde, a forma física e os deportes
- Marco de xogo e aplicación habilitado en movemento
- MotionCommand ™ Technology (para atallos de xestos)
- Servizos baseados en localización, puntos de interese e conta morta
- Controis remotos 3D para DTV conectados por internet e establecer caixas superiores, ratos 3D
- Tecnoloxía Touchanywhere ™ (para "Non toque" Control/navegación de aplicacións UI)
Paquete de MPU-6050

Como reducir o ruído da MPU-6050?
Podemos tomar os seguintes xeitos de reducir o ruído da MPU-6050.
Use sensores calibrados
Calibrar o acelerómetro e o xiroscopio do MPU-6050 pode eliminar o sesgo e o erro dos propios sensores, reducindo así o efecto do ruído.O proceso de calibración normalmente consta de dúas etapas: calibración estática e calibración de movemento.
Proceso de filtrado de hardware
Engadir condensadores de filtro á liña de alimentación de MPU-6050 pode reducir o impacto do ruído da alimentación no sensor.Mentres tanto, durante o esquema de PCB, deberiamos intentar manter a MPU-6050 afastada das fontes de interferencia potenciais, como as liñas de sinal de alta frecuencia e os compoñentes de alta potencia.
Procesamento de filtrado de software
Despois de recoller os datos en bruto de MPU-6050, podemos engadir unha ligazón de filtrado de software para pre-procesar os datos iniciais para eliminar a interferencia inducida polo ruído.Os métodos de filtrado de software de uso común inclúen filtrado medio, filtrado mediano, filtrado de Kalman, etc.
Use filtro interno de paso baixo
MPU-6050 ten un filtro de paso baixo dixital integrado interno, que se pode usar para reducir o ruído de alta frecuencia ao establecer a súa frecuencia de corte.En concreto, podemos establecer a frecuencia de corte do filtro dixital modificando o rexistro de configuración do MPU-6050 para eliminar o ruído de alta frecuencia causado pola mostraxe de A/D.
Cálculo de traxectoria de movemento baseado en MPU-6050
O MPU-6050 é un acelerómetro de seis eixes e sensor de xiroscopio que se pode usar para medir o movemento e a actitude dos obxectos.O cálculo da traxectoria de movemento baseado no MPU-6050 pode realizarse cos seguintes pasos:
O primeiro paso é ler os datos do sensor.Necesitamos ler os datos do acelerómetro e do xiroscopio dos sensores MPU-6050 empregando controladores e funcións de biblioteca apropiadas.Estes datos adoitan saír nun formato dixital, polo que se necesitan algúns traballos de conversión e calibración para convertelos en medidas reais en unidades físicas.
O segundo paso é calcular a aceleración.En primeiro lugar, necesitamos procesar os datos do acelerómetro para obter a aceleración do obxecto en cada eixe.Posteriormente, para calcular a velocidade e o desprazamento do obxecto en cada eixe, necesitamos integrar os datos de aceleración.Neste proceso úsanse técnicas de integración numérica, como o método de Euler ou o método Lunger-Kutta, para garantir a precisión dos cálculos de desprazamento.
O terceiro paso é calcular a velocidade angular.Usando datos do xiroscopio, pódese calcular a velocidade angular do obxecto en cada eixe.De novo, estes datos deben ser calibrados e convertidos para obter a velocidade angular nas unidades físicas reais.
O cuarto paso é calcular a rotación.Ao integrar os datos de velocidade angular, pódese calcular o ángulo de rotación do obxecto en cada eixe.Isto pódese facer mediante técnicas de integración numérica como o método de Euler ou o método Longe-Kutta para calcular o ángulo.
O quinto paso é fusionar os datos.Combinamos os datos de acelerómetros e xiroscopios para obter información completa de actitude e posición do obxecto.Isto pódese facer empregando algoritmos como o solucionador de actitude baseado no cuaternion ou o solucionador de ángulo Euler.
O sexto paso é visualizar os resultados.Convertemos a traxectoria de movemento do obxecto computado nun conxunto de puntos nun sistema de coordenadas 3D e amosámolo empregando ferramentas de visualización adecuadas para unha comprensión máis intuitiva da traxectoria de movemento e dos cambios de actitude do obxecto.
Preguntas frecuentes [preguntas frecuentes]
1. Que precisión ten MPU6050?
Os resultados adquiridos mostraron unha precisión suficiente inferior ao 1 % e fiabilidade, asegurando a dimensión adecuada do eixe do ascensor e os altos estándares da industria do ascensor.
2. Como ler datos de MPU6050?
Para ler os rexistros internos de MPU6050, o mestre envía unha condición de inicio, seguido do enderezo de escravo I2C e un bit de escritura, e logo o enderezo de rexistro que se vai ler.
3. Onde se usa MPU6050?
En dispositivos de seguimento de fitness de seguimento de saúde.En drones e cuadcopters, mpu6050 úsase para o control da posición.Usado no control do brazo robótico.Dispositivos de control de xestos de man.
4. ¿É MPU6050 un IMU?
O bloque de sensores IMU MPU6050 le datos do sensor MPU-6050 que está conectado ao hardware.O bloque produce aceleración, velocidade angular e temperatura ao longo dos eixes do sensor.
5. Cal é o procesamento de MPU6050?
Este é o procesador a bordo do MPU6050 que combina os datos procedentes do acelerómetro e do xiroscopio.O DMP é a clave para usar o MPU6050 e explícase en detalle máis tarde.Do mesmo xeito que con todos os microprocesadores, o DMP necesita firmware para executar.
proba de función.Os produtos máis rendibles e o mellor servizo son o noso compromiso eterno.
Artigo quente
- Son intercambiables CR2032 e CR2016
- Mosfet: definición, principio de traballo e selección
- Instalación e proba do relevo, interpretación de diagramas de cableado do relé
- CR2016 vs. CR2032 Cal é a diferenza
- NPN vs. PNP: Cal é a diferenza?
- ESP32 VS STM32: Que microcontrolador é mellor para ti?
- LM358 Guía completa do amplificador operativo dobre: pints, diagramas de circuítos, equivalentes, exemplos útiles
- CR2032 VS DL2032 VS CR2025 Guía de comparación
- Comprender as diferenzas Esp32 e ESP32-S3 Análise técnica e de rendemento
- Análise detallada do circuíto da serie RC
 Explorando as capacidades e aplicacións do chip de comunicación NRF24L01
Explorando as capacidades e aplicacións do chip de comunicación NRF24L01
2024-04-25
 MMBT3904 Transistor NPN: as súas especificacións, guía de aplicacións integral e MMBT3904 vs. MMBT5551
MMBT3904 Transistor NPN: as súas especificacións, guía de aplicacións integral e MMBT3904 vs. MMBT5551
2024-04-25
Número de parte quente
 CC0402KRX7R8BB562
CC0402KRX7R8BB562 SQCSVA3R0BAT1A
SQCSVA3R0BAT1A LD035C104KAB2A
LD035C104KAB2A- CC0402CRNPO9BNR80
 GRM1885C2A7R4CA01D
GRM1885C2A7R4CA01D F951D106KSAAQ2
F951D106KSAAQ2 TPSD107M010R0065
TPSD107M010R0065 87520-0010BLF
87520-0010BLF ECS-122.8-20-4
ECS-122.8-20-4 MAX1280BCUP
MAX1280BCUP
- AGL1000V2-FGG256
- ICL3226CA
- DS21Q354B
- AT83C26-ALTUL
- V300C15C150BL3
- V24A48M400BL3
- TC33X-2-202E
- VI-J2L-CZ
- PM300DVAA120
- LF412CN/NOPB
- TLV5606IDGK
- TPS71401DRVR
- TMDS442PNP
- T491D686K010ZTPV11
- CSD17577Q5AT
- LT3060EDC-5#TRMPBF
- LT3485EDD-3#TRPBF
- T491B156K016AG
- AD9223ARSZ
- 74LV244ARP
- AM29F010B-90ED
- IDT7025L25PFG
- M36L0T7050B3ZAQF
- M58WR032QU70ZA6U
- MAX2470EUT
- P80C51RA+4A
- SI9100DN02
- TMC3003R2C50
- ZLNB2003
- H27S1G8F2BFR-BI
- NFP-3600-N-A3
- NMS7205A-FB280C
- DS2715BZ
- MN103SB20RGL
- ZR364263NCCG
- OTC3101A-HF141
- E0C63404D1G
- PCI9030AA60PIF
- XC7S6-L1CSGA225I